ニュートン法 (Newton-Raphson methode) は関数の 1次のテイラー近似に基づいており、単純根の近傍では 2 次収束を示す。
拡張精度や多倍長精度の計算では乗算の計算時間が支配的であるので、 目的とする桁数の計算結果を得るための乗算回数を少なくするために、 高次の収束を示す漸化式を利用するのが望ましい。 ここでは高次収束の方法を逆数や平方根の計算に適用した例を紹介する。
ニュートン法により、逆数(reciprocal)1/A を求める漸化式は、次式で与えられる。
有効桁は、繰り返しごとに 2 倍になる。
拡張精度や多倍長精度の計算では乗算の計算時間が支配的であるので、 目的とする桁数の計算結果を得るための乗算回数を少なくするために、高次の収束を示す漸化式を利用するのが望ましい。
1/A の 3次収束の漸化式
hn を導入することで、
反復誤差を明示的に表現し、級数展開によって高次の補正を導出できる。
hn を xn における誤差とする。
この方法では、各反復ごとに有効桁数が約 3 倍になる。
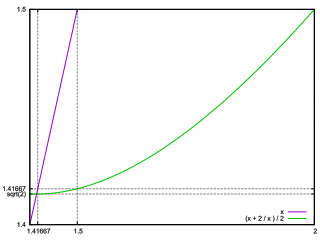
1/A の 4 次収束の漸化式1/A の 5 次収束の漸化式同様の手法が平方根の計算にも適用できる。平方根 √A のニュートン法による漸化式は次式で与えられる:
しかし、この式には A / xn の除算を行わなければならないという不利な点がある。
そこで、1/√A のニュートン法を考えてみると、より良い漸化式が得られることに気がつく。
1/√A のニュートン法による漸化式つまり、3/2, 1/2 は定数であるので、上の式では乗算が必要とされるだけである。
√A を求めるには、B = 1/√A を求めてから、
√A = AB により √A を求める。
逆数の計算の場合と同様に高次収束の漸化式を利用するのが良い。
以下では、1/√(1 - h) の級数展開を使用している。
1/√A の 3 次収束の漸化式hn は、xn の誤差と同じである。繰り返しごとに有効桁は 3 倍になる。
1/√A の 4 次収束の漸化式1/√A の 5 次収束の漸化式1/√A の 6 次収束の漸化式√A の 6 次収束の漸化式1/√A の場合と同様に、√(1 - h) の級数展開を使用している。
hn の計算に / (除算) が必要という重大なデメリットがあるのに要注意。
1/∛A (= A-1/3) の 6 次収束の漸化式1/∜A (= A-1/3) の 6 次収束の漸化式/* _sqrt - compute the square root of x.
* Rev.1.0 (2026-01-29) (c) 2002-2026 Takayuki HOSODA
* SPDX-License-Identifier: BSD-3-Clause
*/
#include <math.h> /* frexp(), ldexp(), NAN */
double _sqrt(double x);
double _sqrt(double x) {
double a, d, h;
int e;
/* Lookup table for scaling factor based on exponent parity */
static const double scf[3] = { M_SQRT2, 1.0, M_SQRT1_2 };
if (x < 0) return NAN; /* Return NaN for negative input */
if (x == 0) return x; /* sqrt(0) = 0 */
/* Range reduction: x = d * 2^e, where d in [0.5, 1) */
d = frexp(x, &e);
/* Initial approximation of 1 / sqrt(d) using 3rd-order polynomial */
/* Approximation error |err| < 5e-4 over d in [0.5, 1] */
a = 2.605008 + d * (-3.6382977 + d * (2.9885788 - 0.9557557 * d));
/* Scaling: convert 1/sqrt(d) to 1/sqrt(x) */
a = ldexp(a * scf[1 + e % 2], -e / 2);
/* Compute residual h = 1 - x * a^2, then apply correction */
/* 6th-order convergence in final refinement */
h = 1 - x * a * a;
a *= (1 + h * (0.5 + h * (0.375 + h * (0.3125 + h * (0.2734375 + h * 0.24609375)))));
return x * a; /* Return sqrt(x) = x * (1 / sqrt(x)) */
}
このコードはアルゴリズムを説明するための実装例です。
IEEE 754 double の場合、libc の sqrt 関数の方が高速であり、
プロセッサにネイティブの sqrt がある場合はさらに大幅に高速です。

![[Mail]](/~lyuka/images/mail.gif)



